�ձ����� YASKAWA �E�Rϵ�У��}�_ָ���ͣ��ŷ�늙C SJME
��Ʒ�����������E�Rϵ�ЮaƷ���������㡢�������ݡ���푑������D�ء��߾��ȡ� ��200V���� 100W/200W/400W/750W��
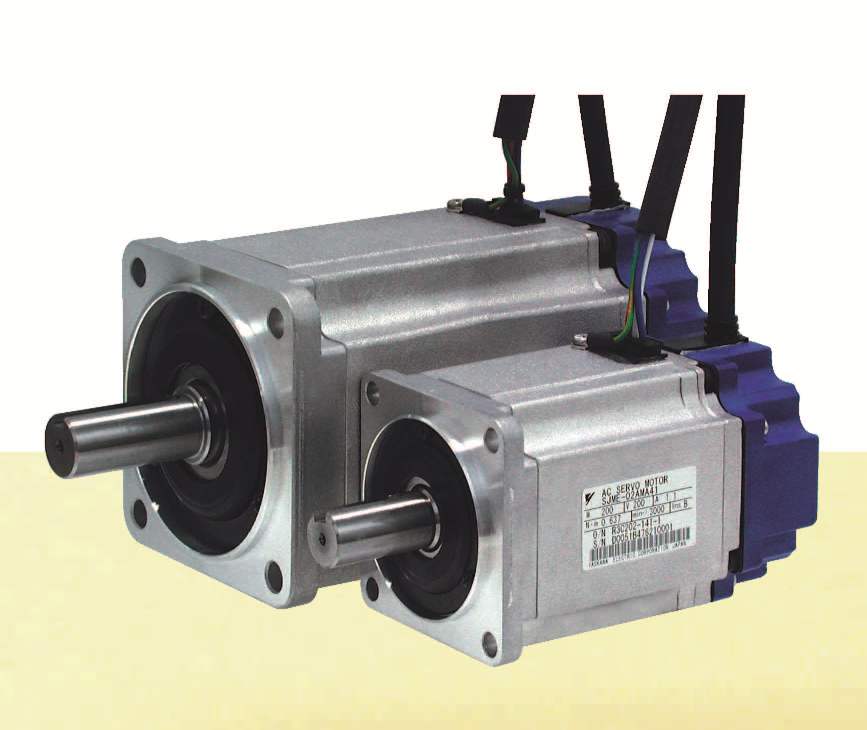
�ŷ�늙C SJME
�� �~��ֵҎ��
늉� AC200V �f��
�ŷ�늙C��̖��SJME-????A 01 02 04 08
�M���ŷ���Ԫ SJDE-????A 01 02 04 08 ��
�~��ݔ��*1 W 100 200 400 750 λ���~�������c��늙Cݔ����
�~���D��*1,*2 N?m 0.318 0.637 1.27 2.39 λ���~�������c���D�ء�
˲�r����D��*1 N?m 0.955 1.91 3.82 7.16 늙C˲�g��ݔ��������D�ء�
�~�����*1 Arms 0.84 1.1 2.0 3.7 ���~�������c�\�D�rͨ�^늙C�������
˲�r������*1 Arms 2.5 3.3 6.0 11.1 ˲�g���^늙C��������
�~���D��*1 min-1 3000 λ���~�������c���D�١�
����D��*1 min-1 4500 ��ʹ�õ�����D�١�
�D���� N?m/Arms 0.413 0.645 0.682 0.699 �����D�ؕr����늙C����ı�����
�D���D�ӑT�� kg?m2��10-4 0.0634 0.330 0.603 1.50 ���P�D�ӵ��D�S���D�ӑT����
�~������׃����*1 kW/s 16.0 12.3 26.7 38.1 ÿ��λ�r�g��늙Cݔ����
�~���Ǽ��ٶ�*1 rad/s2 50200 19300 21100 15900 ���~���D�ؼ��ٕr����Փ�Ǽ��ٶȡ�
��Ҳ�ɷQ�D�ؑT���ȣ�
�r�g�~�� �B�m [�B�m�~��]��ָ��ָ���l���£���ʹ�B
�mʹ��Ҳ�����^Ҏ���Ĝض������ȣ�
Ҳ�����^�������Ƶ��~��ֵ��
�͟Ἁ�e B 늙C��Ȧ������͟�ضȞ�130�档
��Ӽ��e V15 늙C�\�Еr��ʹ�����Ӌ�����y������
ֱ���S��2�����S��ƽ�з����ϵ���
�������׆�λ��ʾ�����ȫ�����
�^���͉� AC1500V 1��� ��
�^����� DC500V��10M������ ��
���o��ʽ ȫ�]����IP55
�����S؞ͨ�����B������ ��ʾ��ֹ�ۉm��ˮ���M��ęCе���o�Y
���ij̶ȡ�
�͛_���� �_�����ٶȣ����¡����ҡ�ǰ��3����490m/s2���_���Δ���2�� ��ʾ늙C�Sˮƽ�����b�r�������¡�
���ҡ�ǰ��3����_�����͛_���ԡ�
������ ��Ӽ��ٶȣ����¡����ҡ�ǰ��3����49m/s2�� ��ʾ늙C�Sˮƽ�����b�r�������¡�
���ҡ�ǰ��3����_���Ŀ����ԡ�
________________________________________
*1�� �@Щ�Ŀ���D���D���������ں�SJDE���ŷ���Ԫ�M���\�D�r늘о�Ȧ�ضȞ�100��r��Typֵ��������20��r�Ĕ�ֵ��
*2�� �~���D�ر�ʾ���b���X��ɢ������250��250��6(mm)���r���܇��ضȞ�40 ����B�m���S�D��ֵ��
�� �Ƅ���Ҏ��
�ŷ�늙C��̖��SJME-????A 01 02 04 08 �f��
�~��늉� DC24V��10% ��
�Ƅ������D�ӑT��* kg?m2��10-4 0.0075 0.064 0.171 ��
���� W 6 6.9 7.7 ��
�����D�أ��oĦ���D�أ� N?m 0.318
���� 1.27
���� 2.39
���� ��ʹ�o늙C�Sʩ������Ҳ�ܱ���ݔ���Sֹͣ
��B���D��ֵ��
��Ȧ��� ����20��r�� 96 83 75 �Ƅ����Ȳ���Ȧ�����ֵ��
�~����� A��20��r�� 0.25 0.29 0.32 �Ƅ������_�r���^�������
�Ƅ����_�ŕr�g ms 80���� ��
�����D�ص������r�g ms 100���� ��
________________________________________
*����Ӌ�㎧�б����Ƅ�����늙C�D�ӑT���r��Ո��[�D���D�ӑT��]�ϼ���[�Ƅ����D�ӑT��]���ɴˎ�
�б����Ƅ�����늙C���~������׃���ʺ��~���Ǽ��ٶ�Ҳ�S��׃����
��ע��1 �����Ƅ������\�D�е�늙C�Ƅӕr����ʹ�á�
��ע��2 ʹ�Î������Ƅ�����늙C�r�����ŷ�ON�Ġ�B��Ո��Ҫ�����Ƅ�������t�������ŷ�
��Ԫ�^ؓ�d�������Ƅ����ĉ������͡�Ո�ձ����ŷ�OFF�Ġ�B�����Ƅ�����
�ձ����� YASKAWA �E�Rϵ�У��}�_ָ���ͣ��ŷ����� SJDE
�ŷ����� SJDE �~��ֵ?Ҏ��
�ŷ���Ԫ��̖ SJDE- 01APA 02APA 04APA 08APA �f��
�m���ŷ�늙C����[kW] 0.1 0.2 0.4 0.75 ���ŷ���Ԫ�����\�D��
늙C������
�B�mݔ�����[Arms] 0.84 1.1 2.0 3.7 �ŷ���Ԫ�B�mݔ����
�Դ��
˲�g���ݔ�����[Arms] 2.5 3.3 6.0 11.1 �ŷ���Ԫ˲�gݔ������
�������
ݔ���Դ
�����·��
�����·
ͨ�ã� �Դ늉� ���� AC200��230V +10��-15% ��
�Դ�l�� 50/60Hz ��5% ��
�Դ����
���~��ݔ���r��
[kVA] 0.40 0.75 1.2 2.2 ���~��ݔ���\�D늙C�r
��Ҫ���Դ������
�ŷ��Դ����pʧ
���~��ݔ���r��[W] 14 16 24 35 ָ늙C���~���D�ء��~
���ٶ��\�D�r�����ŷ�
��Ԫ�ԟ���ʽ��ʧ����
��ܡ�
ݔ����Ʒ�ʽ ���ݔ���͆���ȫ������
�����_�������ֹ��裩 ��
ݔ�����Ʒ�ʽ PWM���� ���Ҳ�����ӷ�ʽ ��
���� ģ�Mݔ�����a�� ��늙C�ķ�ؓ�d�Ȱ��b
λ�û��ٶșz�y����
���Sؓ�d�D�ӑT��[kgm2]*1 0.6��10-4 3��10-4 5��10-4 10��10-4 �Cе��늙C�S�Q����D
�ӑT�������S����
ݔ
��
ݔ
��
��
̖ ָ��ݔ��ݔ����
̖ͨ�^�}�_�_�P
���x���}�_�N
��}�_�ֱ��� �}�_�N� ����4�N���x��
1. CCW+CW
2. ��̖+�}�_��
3. CCW+CW��߉���D��
4. ��̖+�}�_�У�߉���D�� ���ŷ���Ԫݔ���늙C
�����}�_����̖�ķN
�[CCW+CW]����
�D�}�_�кͷ��D�}�_��
��ݔ�롣
�}�_�ֱ��� ����4�N���x��
1. 1000pulse/rev
����늘O�_·/��·�ӣ����75kpps
2. 2500pulse/rev
����늘O�_·/��·�ӣ����187.5kpps
3. 5000pulse/rev����·�ӣ����375kpps
4. 10000pulse/rev����·�ӣ����750kpps 늙C���Dһ�ܕr��Ҫ��
ָ���}�_����
���ݔ����̖ ��OFF��ON��߅�����λ��ƫ�� ��
�ŷ�ONݔ����̖ 늙C�Դ�_�c�P ��
��ݔ����̖ �rOFF
��ע���Bͨ�Դ��s2��犞�OFF��B ��
�Ƅ���ݔ����̖ �ⲿ�Ƅ���������̖����ON���_�Ƅ��� ��
��λ�Y��ݔ����̖ �F��λ����ָ��λ�á�10pulse���_ ��
Դ�cݔ����̖ ��늙Cԭ�c���_�����ȣ�1/500rev��
��ע��Ոʹ��OFF��ON���}�_߅�� 늙Cԭ�c��ָ늙C���D
1�ε�ij��λ�á�
��
��
��
�� �ӑB�Ƅ������� ���ã��Դ�P�]�r���ŷ��P�]�r���r������ͣ
ֹ��o���ơ��ԴOFF��B��ON�� ���ŷ���Ԫ�Ȳ�ͨ�^��
·��·����늙Cֹͣ��
������
����̎������ �xُ����������Դ�^��rʹ��������Ԫ�� ������늙C����������
���D�r�a�����������
�Ĺ��ܡ�ؓ�d�D�ӑT��
�^��rҲ��Ҫ�Ĺ��ܡ�
���o����*2 �ٶȮ������^ؓ�d�����a�����ϡ�늉��������^�
�����ŷ���Ԫ�����L��ֹͣ��ϵ�y���ϣ�ע���o��
�ýӵر��o�· ��
LED�@ʾ���� 5�N��PWR��REF��AL1��AL2��AL3�� ��
ָ���^�V�� ��FIL�_�P�O��8�� ��
��s��ʽ �����L�䣨�����L�ȣ� ��
ʹ�íh���ض� 0�桫+55�� ��
ʹ�íh����� 90%RH���£����ýY¶�� ��
����h���ض� -20�桫+70�� ��
����h����� 90%RH���£����ýY¶�� ��
ʹ�íh�� �����и��g�Ԛ��w���m�����F�۵ȣ�����ճ��ˮ��
�������͵� ��
�˸� ����1000m���� ��
����� 4.9m/s2 ��
�͛_�� 19.6m/s2 ��
ʹ�íh�� �^늉�����II���o�p�ȣ�2��
���o�ȼ���IP1X(EN50178) ��
________________________________________
*1��Ո�ձ������Sؓ�d�D�ӑT���ķ�����ʹ�á��糬�^���Sؓ�d�D�ӑT����늙C���\�Ќ���������
*2�������\�D���c����Ȧ�Ȳ��A�O�еؾ����������l���£��Еr�o���M�б��o��
? 늙C���·��|��늙C���·��|���B�����ȵĵ����ؾ���
? �ؾ���B�½�ͨ�Դ�r��
�阋�ɸ���ȫ��ϵ�y��Ո�O�ÿ�ͬ�r�M���^�d���o�c��·���o��©는�·����M�ϽӾ��Ô�·��
���O�Ì����ڽӵر��o��©는�·����
|